
信倍通产品
AllegroHand四指灵巧手
Wonik Robotics 作为机器人灵巧手技术领域的佼佼者之一,专注于创新机器人手与触觉灵巧手研发,凭借强大技术、独特设计、先进传感技术及优化控制算法,打造出高性能的 Allegro Hand 四指灵巧手系列产品,包括 Allegro Hand V4、Allegro Hand V5 (4F) 及 Allegro Hand V5 (4F) Plus。

Allegro Hand V4 四指灵巧手

Allegro Hand V4 专为机器人复杂抓握、柔性操作及触觉传感器研究设计。它有4根手指,具备16个独立电流控制关节,采用轻量级拟人设计,成本较低,适用于研究和工业领域。其最大承重5公斤,支持实时控制,还配备多种现成的无传感器抓握算法,能处理各种物体几何形状。

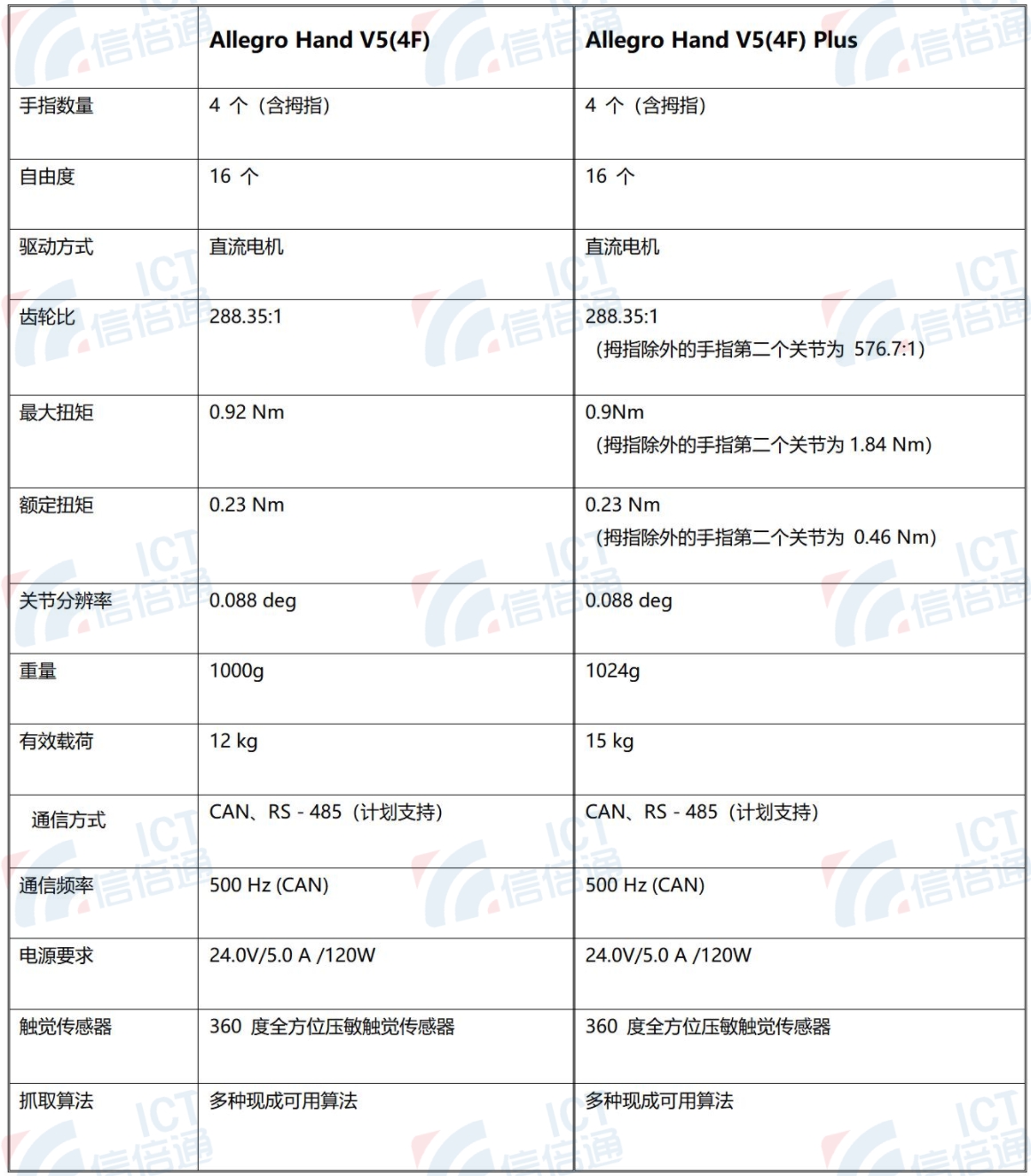
Allegro Hand 四指灵巧手技术参数

Allegro Hand V5系列
Allegro Hand V5 (4F)系列在V4基础上新增全向触觉传感器,功能更强大。该系列产品的全向触觉传感器硬度与人类手指相似,能灵活操作各类物体,从刚性到可变形软质材料均可处理,还解决了3D形状手指传感器中出现的信号失真。
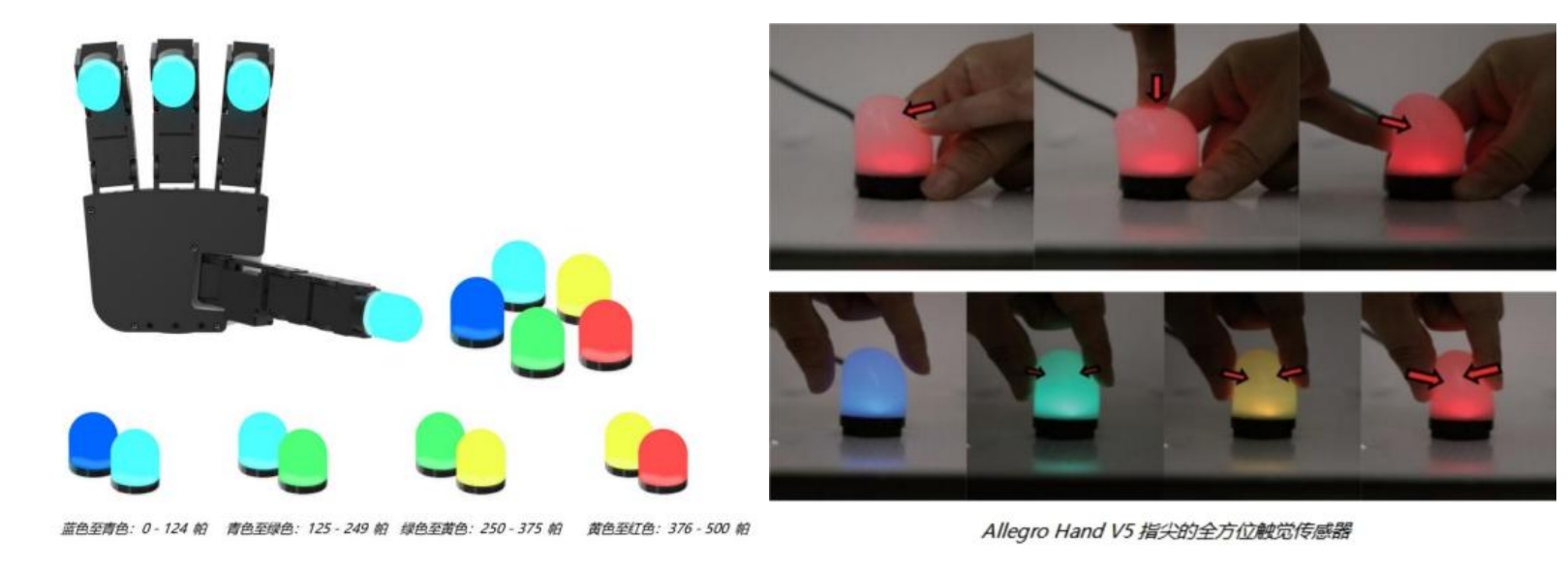
Allegro Hand V5 (4F) 及V5 Plus都具备多种现成抓取算法,能处理各种几何形状物体;配备手指状360度全向压敏触觉传感器,感知全面精准;拥有16个独立电流控制关节(4个手指,每个手指4个自由度),经济高效,适用于研究和工业应用。

Allegrohand广泛的应用场景
科研和教育领域:用于抓取控制算法、具身智能、触觉传感及机器人动态操作等研究。
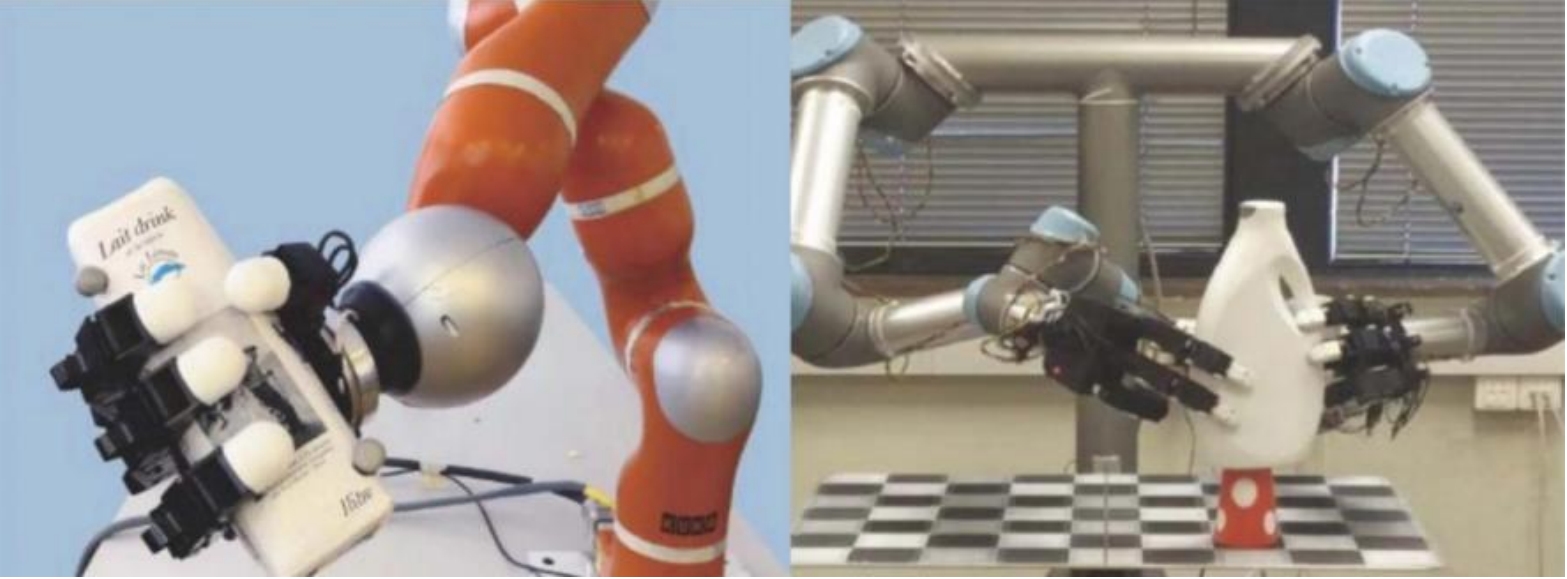
工业领域:提升装配和物料搬运的效率与质量。Allegro Hand V5 尤其适用于食品包装、眼镜制造等对处理易碎和柔软物品有要求的场景,在人形机器人和移动操作领域作为末端执行器,可使手部动作自然精准。

Wonik Robotics 与众多研究机构和企业紧密合作,不断拓展产品应用领域,推动技术创新,持续优化产品性能,以满足全球客户多样化需求。


产品详情

信倍通科技(北京)有限公司是领先的前沿科技和产品引进、整合、推广、集成和服务商,基于全球丰富的供应商资源,立足国内应用场景和市场,贯通国内外先进技术经验和多样需求,为中国客户提供智能安全的协作机器人和机器人协作应用方案、精准独特的测量检测设备、丰富精密的感知传感产品、强壮有效的外骨骼及高速低时延大通量的5G芯片等产品。
扫一扫 关注官方微信公众号

