
Xsens动作捕捉系统:驱动人形机器人精准运动的核心力量
Xsens 动捕系统源自荷兰,凭借其高精度、低延迟的惯性动捕技术,在动作捕捉领域占据重要地位。该技术广泛应用于影视制作、工业设计、机器人研发、教育培训等多个行业,为不同用户提供高效、稳定的动作捕捉解决方案。

Xsens 动捕系统源自荷兰,凭借其高精度、低延迟的惯性动捕技术,在动作捕捉领域占据重要地位。该技术广泛应用于影视制作、工业设计、机器人研发、教育培训等多个行业,为不同用户提供高效、稳定的动作捕捉解决方案。
Xsens动捕系统技术原理
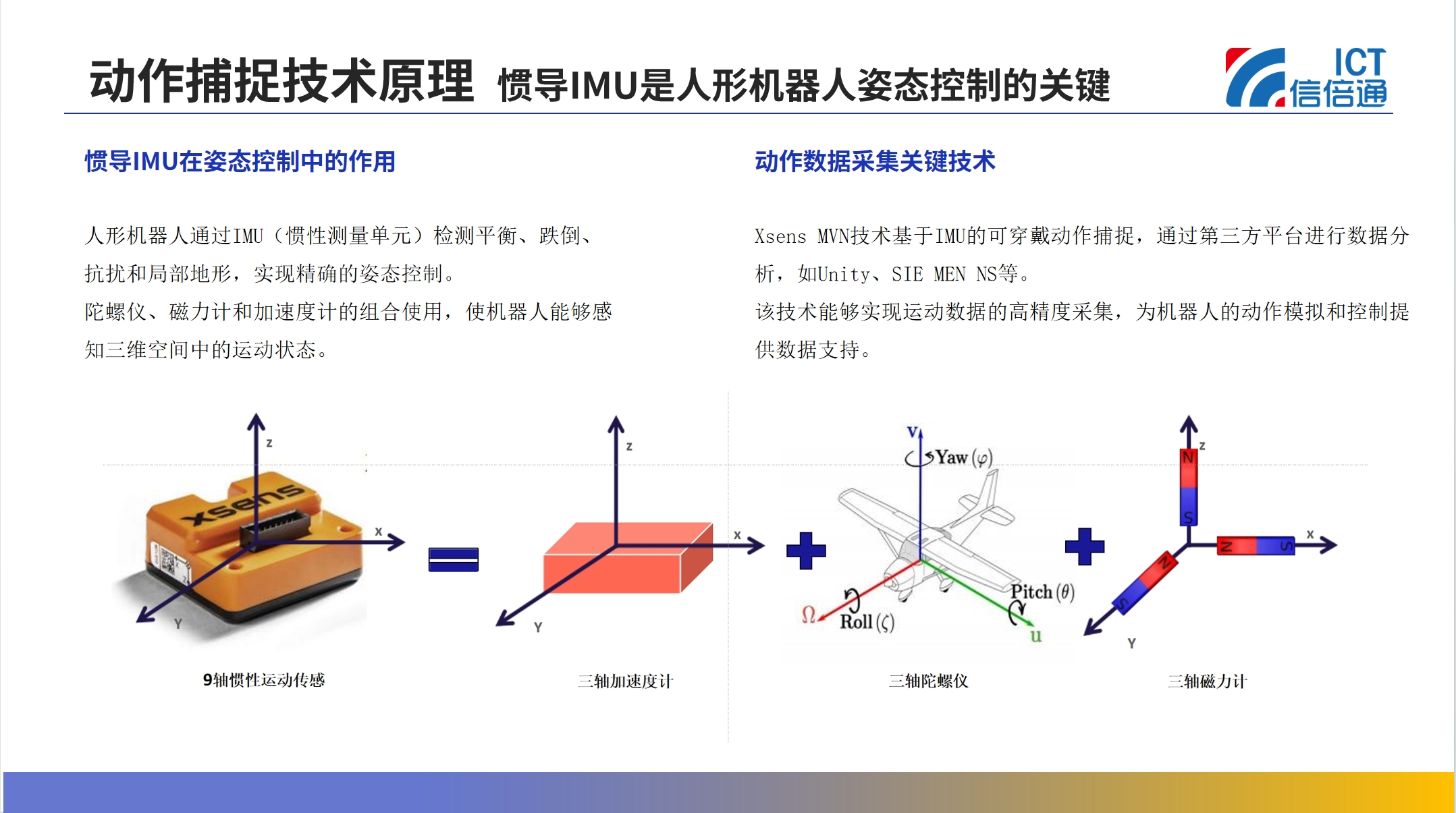
Xsens 动捕技术核心在于先进的惯性传感器组合,每套动捕服配备17个集成传感器,包含三轴陀螺仪、三轴磁力计和三轴加速度计。

- 三轴陀螺仪:通过测量陀螺转子垂直轴与设备的夹角及角速度,能够精准判别物体在三维空间的运动状态。无论是手指关节的细微转动,还是身体的大幅度旋转,都能被精确感知,为动作捕捉提供了基础的运动数据。
- 三轴磁力计:依据类似指南针的原理,测量磁场强度和方向,从而定位设备方位,明确机器人或被捕捉对象的朝向,确保在动作捕捉过程中方向数据的准确性。
- 三轴加速度计:主要用于检测平衡、跌倒等状态,同时测量运动物体的加速度和运动距离。在动作捕捉时,它可以捕捉到身体的动态变化,如加速、减速、跳跃等动作产生的加速度信息。
- 数据融合与处理:这些传感器收集到的数据,通过先进的传感器校准算法进行融合处理。该算法能够有效整合多传感器数据,去除噪声和误差,精确计算出人体或物体各部位的姿态、位置和运动轨迹,为后续应用提供精准依据。

Xsens动捕系统的主要功能
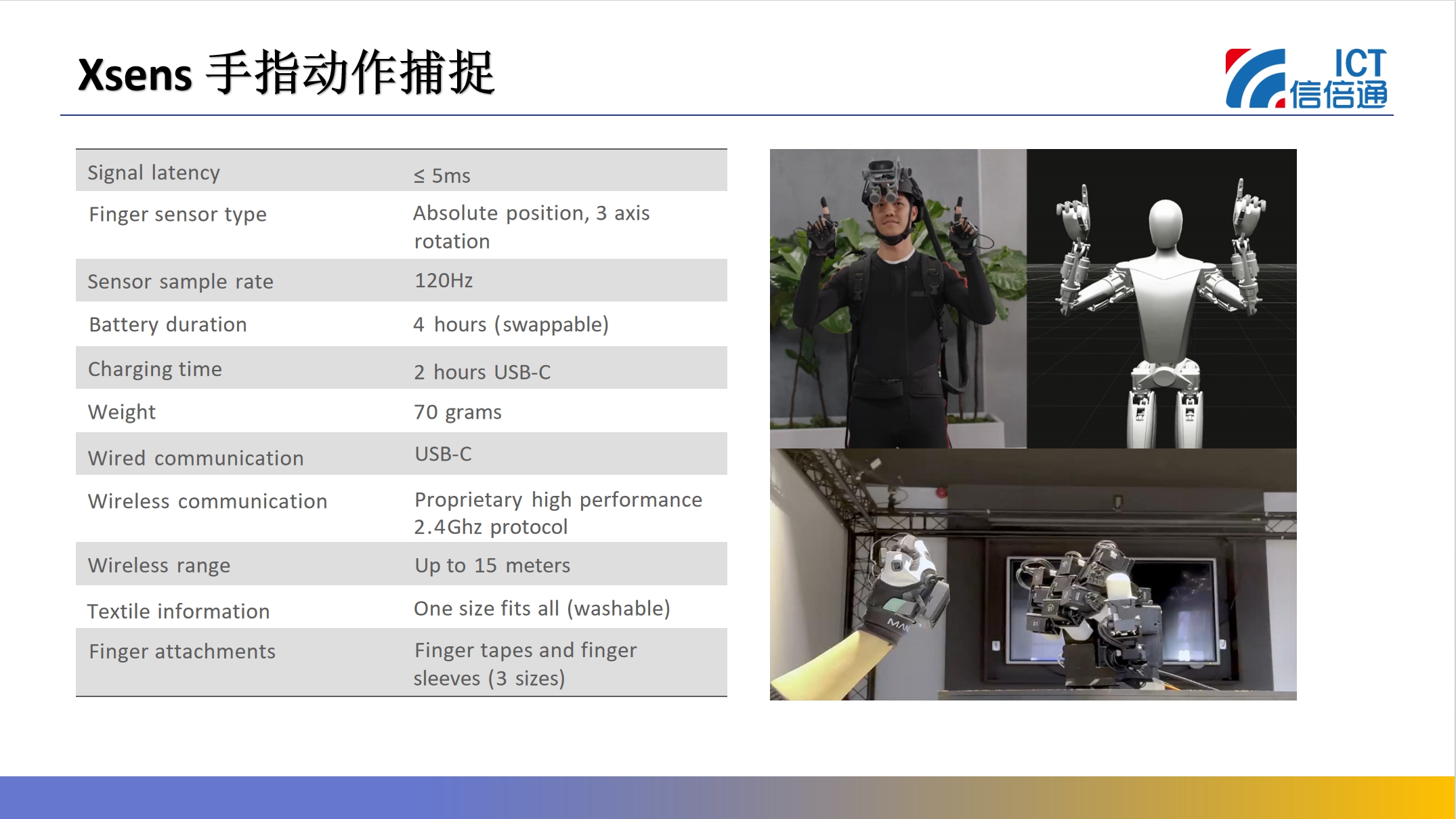
高精度动作捕捉:从细微的手指动作到复杂的全身运动,Xsens 动捕技术都能精确捕捉。其捕捉精度高,能满足专业影视制作、高端虚拟现实体验等对动作细节要求苛刻的场景。
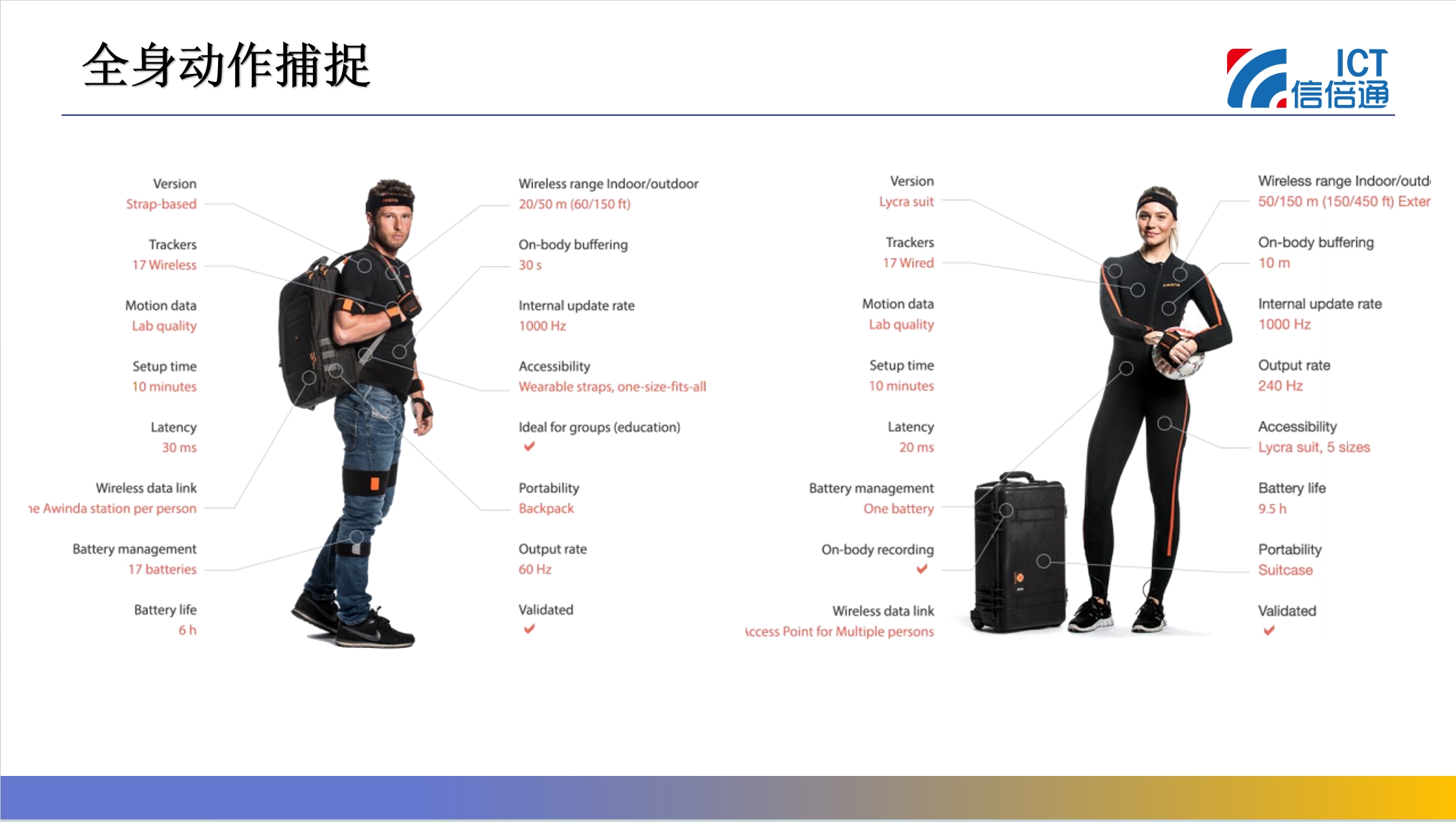
- 灵活的数据传输:支持无线和有线两种传输方式。无线传输延迟最低可达 30ms,有线传输延迟在 20ms 以内,确保数据能够快速、稳定地传输到接收端,满足实时性需求。
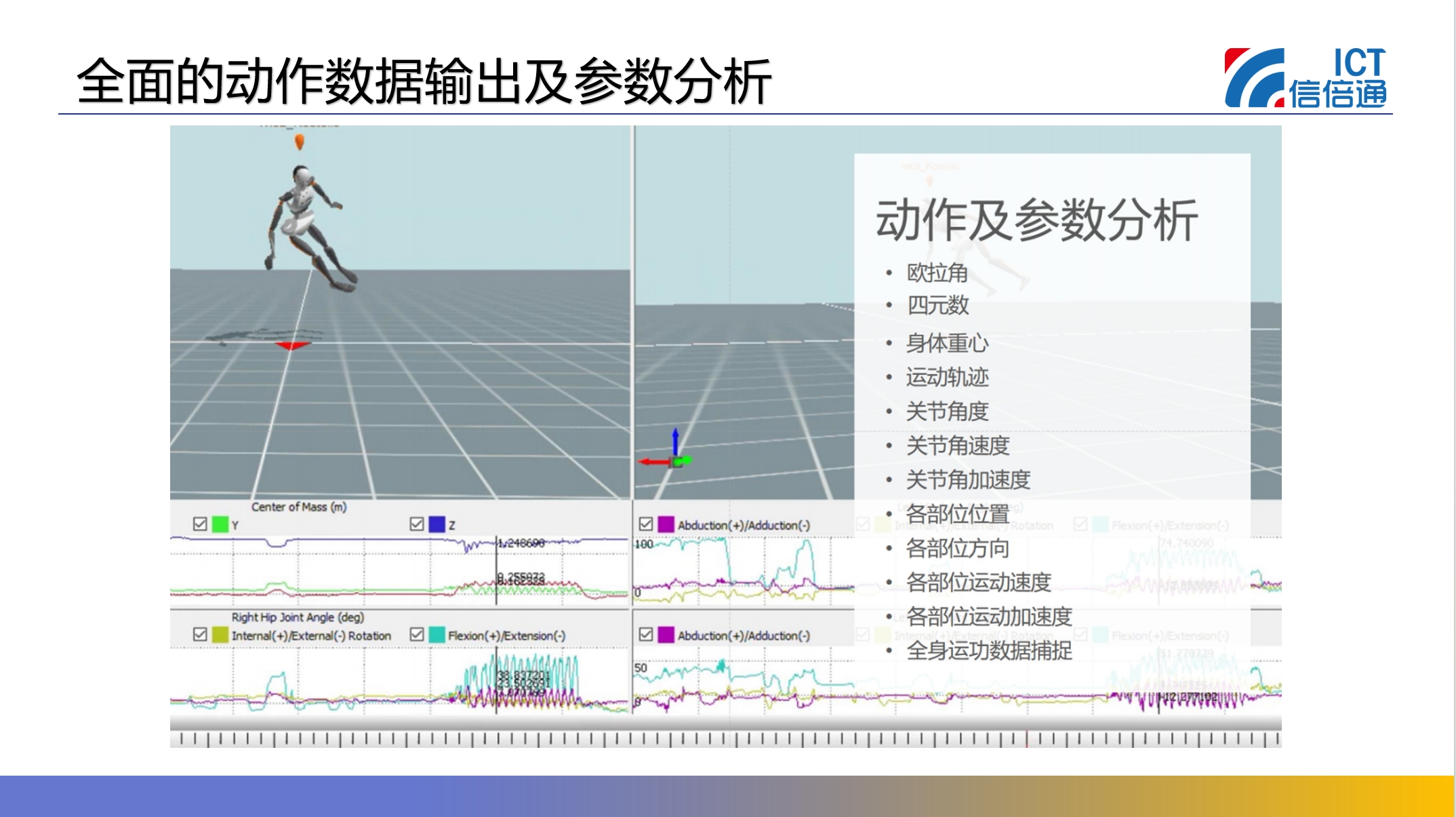
- 全面的数据输出:可实时生成多维度动作数据,包括欧拉角、四元数、身体重心、运动轨迹、关节角度、关节角速度和关节角加速度等。同时,该技术兼容 Unity、Unreal Engine 等主流软件,便于在动画制作、游戏开发等领域进行数据应用和二次开发。
- 便捷的操作体验:Xsens 提供多种穿戴设备,如 MVN Link 紧身衣和 MVN Awinda 肩带系统,都具备快速穿戴启动的特点。配套软件界面直观易用,简化了操作流程,降低了用户的使用门槛。
Xsens动捕技术在人形机器人领域的优势
Xsens动捕系统在人形机器人领域的应用案例
在人形机器人的研发过程中,工程师借助 Xsens 动捕技术捕捉人类的标准动作,为机器人的动作编程提供参考。通过对比机器人实际动作和人类标准动作的差异,对机器人的运动控制算法进行优化,提升机器人动作的流畅性和精准度。在测试阶段,动捕系统能实时监测机器人的动作执行情况,快速发现潜在问题。



