
松灵超轻仿生机械臂及数据采集设备
松灵机器人 AGILEX
专注移动机器人、仿生机械臂与具身智能数据采集设备研发,依托轻量化设计、开放软件生态与高精度控制,推出NERO 7 轴科研机械臂、PiPER 全系列 6 轴 超轻仿生机械臂、PiKA 数据采集设备,覆盖科研教学、具身智能、人形机器人、精密操作、多模态数据采集全场景,为高校实验室、科技企业提供轻量化、易部署、高兼容的操作与数据采集解决方案。
一、NERO 轻量化7轴科研机械臂

松灵NERO轻量化7轴机械臂 是专为具身智能科研和人形机器人开发设计的科研级产品,采用仿人七轴冗余构型,精准复刻人类手臂7个自由度,运动更拟人,适配复杂交互与精密操控。
核心优势
-
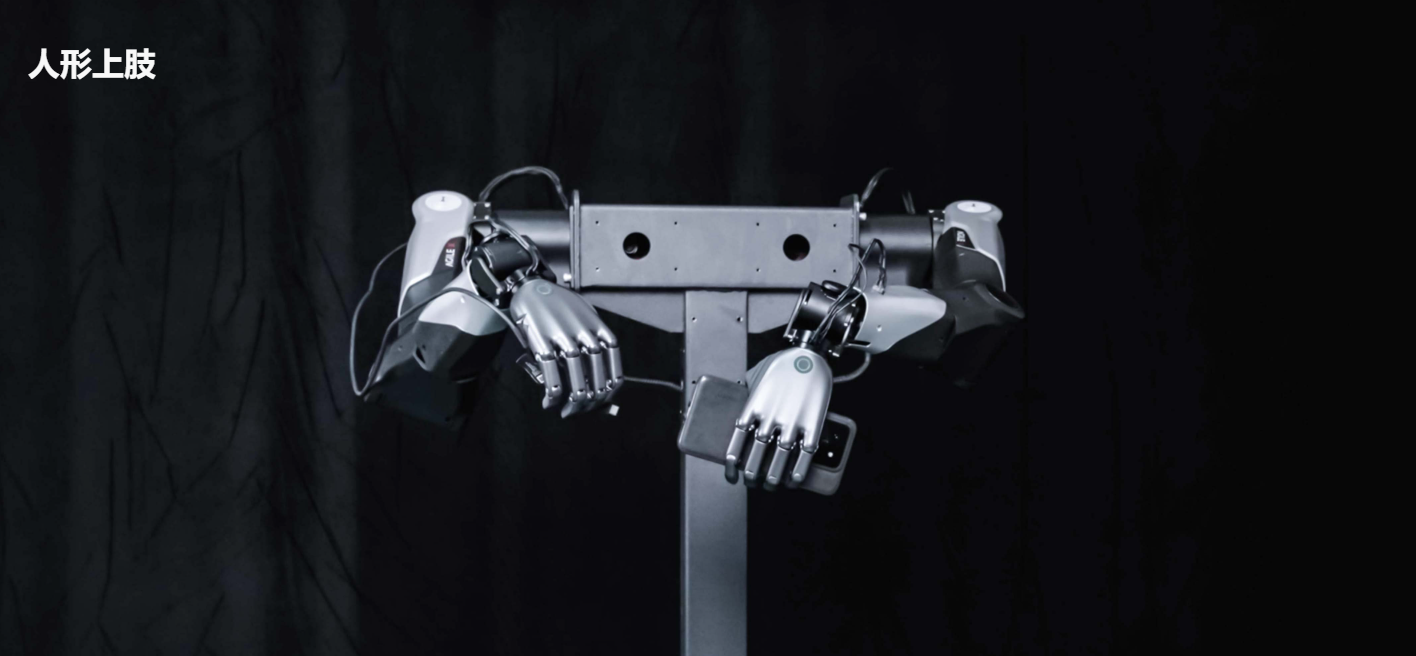
7 轴冗余构型复刻人臂运动特性,空间可达性与动作灵活度更优,适配人形机器人上肢研究
-
轻巧易部署自重 4.8kg,负载 3kg,支持台面 / 侧装 / 倒装,可适配松灵全系列移动底盘
-
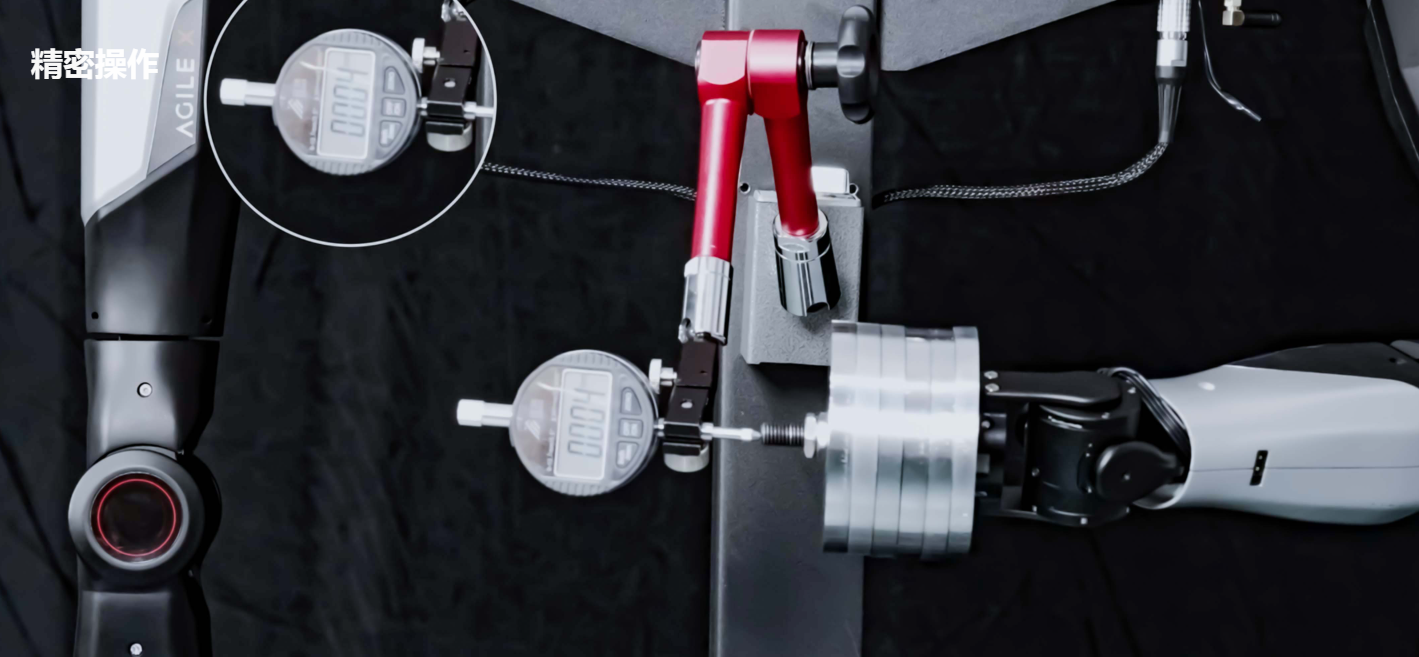
精准可靠操控重复定位精度 ±0.1mm,内置碰撞保护,综合功耗≤60W,长期稳定运行
-
开放开发生态兼容 ROS1/ROS2,支持 Gazebo/IsaacSim 仿真开发,提供 Python SDK 与多协议通讯
产品参数
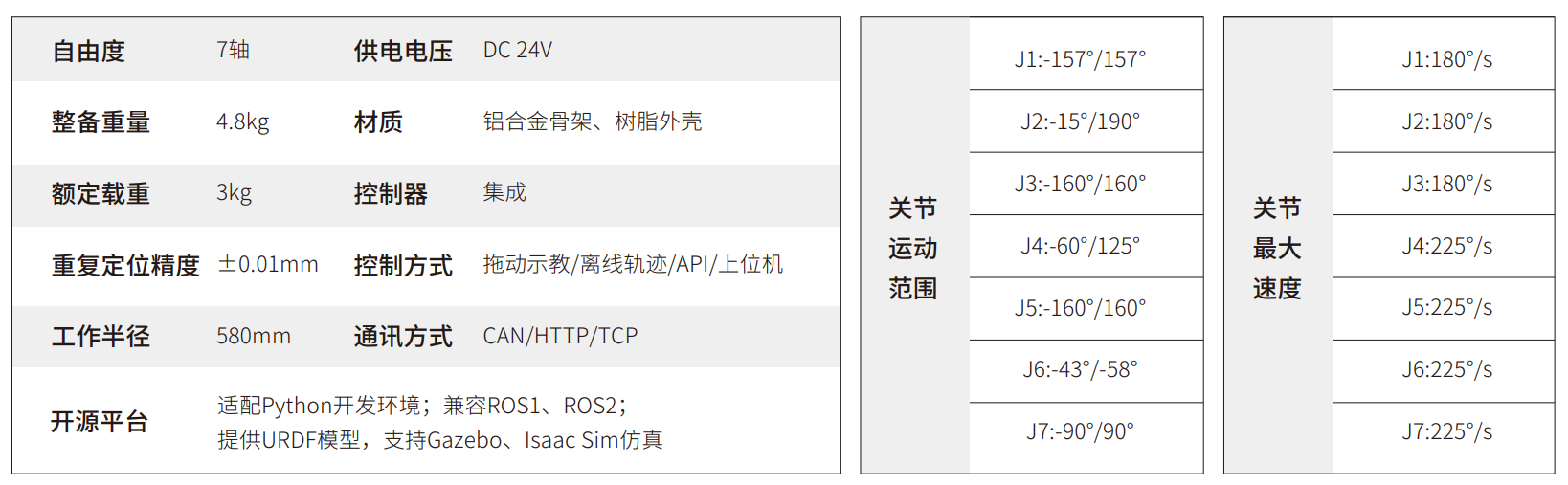
应用场景
高校科研、具身智能实验、人形机器人上肢研究、模仿学习、移动协作一体化、精密交互操作。

二、PIPER 超轻仿生机械臂系列
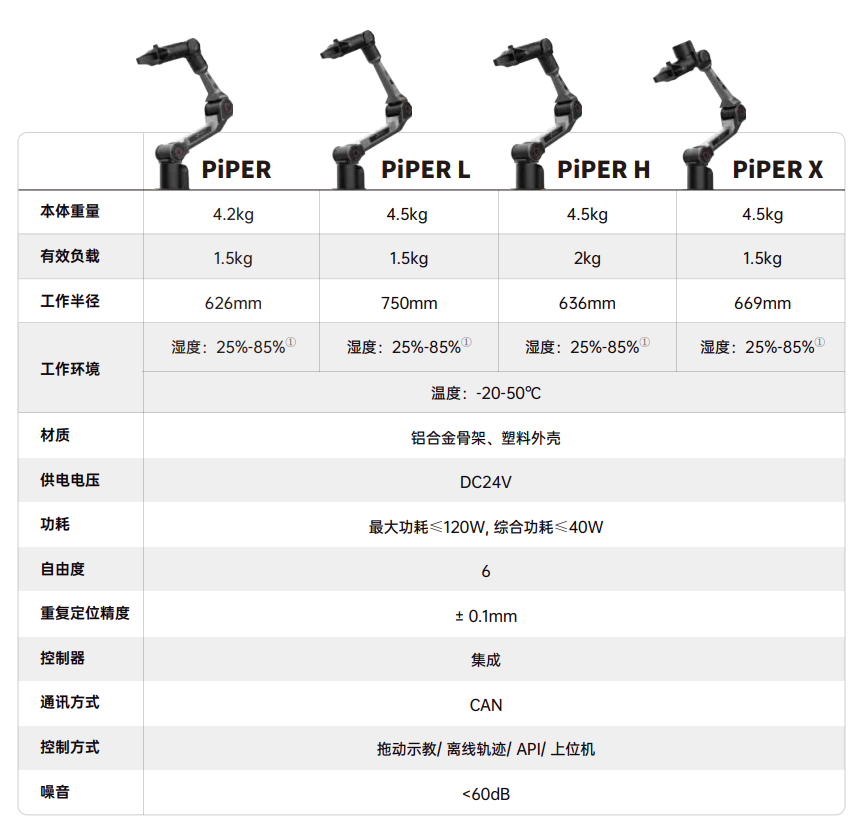
松灵 共推出四款PIPER 6轴 超轻仿生机械臂,应对不同场景使用需求:

1、PiPER 轻量级 6 轴机械臂 轻量灵巧 稳定高效|入门级科研教学 6 轴机械臂
PiPER全自研的六轴轻量级仿真机械臂,集成先进的运动控制算法与高精度传感器,支持用户进行创新应用开发,通过智能化协作实现高效的教学实践和科研创新。
2、PPER L 长臂展 6 轴机械臂
一款长工作半径科研机械臂,臂展更大,可覆盖更广作业空间。可在水平与垂直方向触达远距离目标,同时保持末端动作稳定与精度,适用于大范围操作与移动平台集成。

3、PiPER H 中高负载 6 轴机械臂
一款面向科研与工程验证的中高负载仿真机械臂,末端负载2kg。关节与传动系统加固设计,负载工况下仍保持运动稳定与重复精度,适用于抓取搬运与末端工具扩展等研究验证。
4、PiPER X 高精度6轴轻量机械臂 末端球形关节|空间受限科研专用机械臂
PiPER-X 专为空间受限或要求精确定位的科研场景升级未端关节配置,平衡了工作范围与结构强度,可在狭小空间中变换姿态灵活,支持旋转、倾斜、复杂轨迹操作,执行更精细动作,拓展复杂应用边界。
三、PIKA数据采集设备

专为具身智能数据采集设计的通用型便携式数据采集设备,产品包含采集装置、模型推理执行器、以及定位基站的组合,重量轻,性价比高,简化流程,快速采集,快速部署。旨在构建可规模化的高质量多模态数据集生产能力,为机器人模仿学习与算法研发提供核心数据基础。
核心亮点
-
第一视角采集:通过头戴设备以操作者第一视角记录真实交互,数据天然关联操作意图与场景。
-
移动化快速部署:一体化集成设计,开箱即用,支持在多种真实场景中快速开始采集。
-
多模态数据同步:同步采集视觉、深度、位姿等多模态信息,并实现时空对齐。
-
可视化降低门槛:提供可视化引导界面,简化配置与校准流程,提升采集效率。
-
全流程数据闭环:覆盖从数据采集、管理到训练准备的全流程,支持规模化数据生产。

应用场景:为工业研发与高校科研提供高质量、标准化的真实世界交互数据采集能力,加速机器人感知、决策与控制算法的开发与验证。



