
Manus数据手套 + 触觉自适应:UC San Diego 研究构建机器人铰接工具操作新范式
想象一下:机器人能够像人类一样灵巧地使用剪刀裁剪布料、用手术钳进行精准夹持,甚至熟练操作订书机——这不再是科幻电影中的场景,而是加州大学圣迭戈分校(UC San Diego)最新发表在arXiv上的研究带来的突破性进展。

而在这项成就背后,Manus高精度动作捕捉数据手套MetaGloves Pro扮演了不可或缺的关键角色。本文将带您深入拆解这项前沿研究,看Manus如何助力机器人练就一双“巧手绝活”。
一、核心挑战:为何铰接工具是机器人的操作难点?
对人类而言,使用剪刀、钳子等工具几乎是本能反应。但对机器人而言,这些带有活动关节的铰接工具却堪称操作领域的难点,主要原因有二:
1、接触动力学极其复杂
工具内部关节的摩擦力、静摩擦力、回差、间隙等物理现象难以精确建模,导致仿真环境与真实世界存在巨大差异。
2、仿真到现实的迁移鸿沟
在仿真中训练出的“完美”策略,一旦部署到真实机器人上,往往因为微小的物理参数差异而表现不佳,甚至失败。
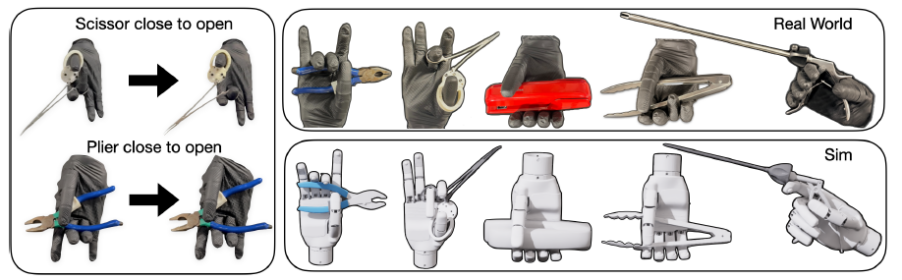
图 1:铰接工具(如剪刀、钳子)的开合力学原理(左)以及仿真与真实世界中抓取姿态的对比(右)
二、破局之道:三阶段训练框架详解
研究团队设计了一套严谨的三阶段训练框架,而Manus数据手套在至关重要的第一步就发挥了决定性作用。
阶段一:仿真预训练 + 扰动注入——打好“基本功”
在仿真环境中训练一个拥有“特权信息”(如物体精确位姿)的“先知”策略。
引入随机力/力矩扰动,模拟真实世界中的重力变化和意外干扰,提升策略的鲁棒性。
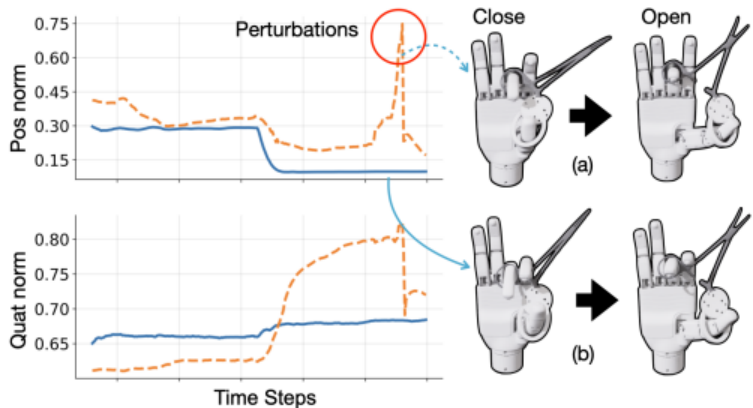
图 2:针对手术钳的位姿范数(上)和四元数范数(下)对比。蓝色为经过扰动训练的策略,稳定性远优于未扰动训练的策略(橙色)
阶段二:策略蒸馏——从“仿真智能”到“本体感觉”
将“先知”策略的知识提炼(蒸馏)成一个仅依赖机器人本体关节位置和简单操作指令的“学生”策略。
这一步剥离了仿真中的特权信息,为向真实世界迁移做好了准备。
阶段三:CATFA触觉自适应——赋予机器人“手感”
提出CATFA(交叉注意力触觉力自适应)模块,通过交叉注意力机制实时融合触觉传感器和电机力矩的反馈信号。
实现对动作意图的在线微调,从而达成动态扰动补偿和接触稳定性控制。
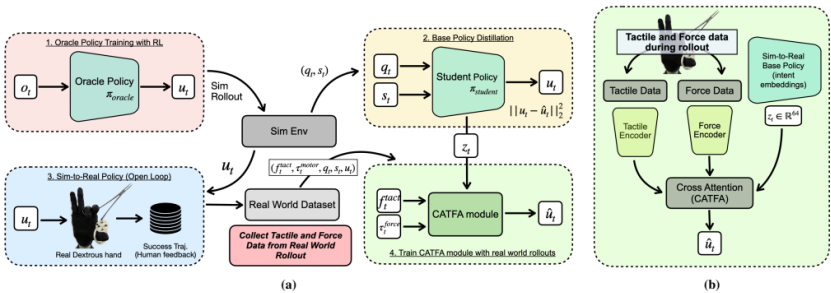
图 3:研究流程全览。(a) 仿真训练与策略蒸馏;(b) 通过 CATFA 模块在硬件上进行在线自适应
三、关键赋能:Manus MetaGloves Pro——精准的“技能初始化器”
任何复杂的操作都始于一个正确的姿势。论文中明确指出:
当机器人自身难以自主获得稳定初始抓取时,研究团队使用Manus MetaGloves Pro进行遥操作示范,为机器人设定符合人体工学的、高成功率的初始抓取姿态。
这一定位至关重要。Manus手套凭借其毫米级精度和25个自由度的全手建模能力,能够捕捉包括拇指外展在内的细微手势,为机器人学习提供了高保真、高可靠性的人类示范数据。

它精准地解决了从“0到1”的初始化瓶颈,确保了整个学习流程从一个高质量的可行解开始,极大提升了研究效率。可以说,Manus手套是后续所有复杂学习得以顺利实现的基础保障。
四、实验验证:五类工具实测,性能显著提升
在严格的实验验证中,这套方法在面对手术钳、普通钳子、订书机、腹腔镜工具等多种铰接工具时,均取得了显著成效。
✅ 成功率大幅提升
对于手术钳和普通钳子等难操控工具,CATFA方法将其操作成功率从基线方法的20%、30%全面提升至100%。
✅ 操作精度优化
即使在基线方法已具备高成功率的工具上,CATFA也进一步优化了操作的稳定性和精度。
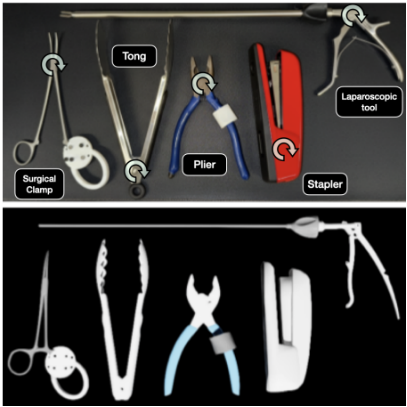
图 4:实验中使用的五种铰接工具,涵盖了从日常工具到专业医疗器械的多种类型
这一成果的价值远不止 “搞定工具操作”:它证实了 “本体感觉策略是仿真到现实迁移的可靠桥梁,少量真实数据 + 触觉 / 力反馈微调是突破瓶颈的关键”。无论是机器人辅助手术、远程灵巧作业,还是智能假肢技能学习,只要涉及 “仿人操作 + 技能示教”,这套逻辑都能复用。
五、应用前景:Manus数据手套的广泛优势
通过这项前沿研究,Manus MetaGloves Pro的核心优势得到了充分验证:
⚡ 高精度与高可靠性
毫米级精度和全手运动捕捉,确保数据真实可靠。
⚡ 高效率与易用性
无需复杂标定,快速部署,无惧遮挡,极大提升科研效率。
⚡ 强大的兼容性与扩展性
模块化设计可轻松集成到多种机器人开发和仿真平台中。
Manus动捕数据手套不仅是实验室的科研利器,更是连接人类智慧与机器智能的关键桥梁。无论是在机器人灵巧操作研发、数字人动画驱动,还是VR/AR人机交互、医疗康复训练等领域,Manus都能提供精准的数据驱动解决方案,帮助用户缩短研发周期,降低实验门槛,持续拓展人机协作的无限可能。
【版权声明】
本文部分技术内容、研究框架及核心数据援引自机器人领域前沿研究论文《In-Hand Manipulation of Articulated Tools with Dexterous Robot Hands with Sim-to-Real Transfer》(arXiv:2509.23075v1 [cs.RO], 2025)。
论文链接:https://arxiv.org/abs/2509.23075
如需转载本文内容,请完整保留本声明并注明原始出处。

