
如何真正理解行为的本质?探讨 Captiks 全身惯性动捕、Manus 手部精细追踪、 Mentalab 脑电的感知范式匹配
挥手是告别,握拳是决心,步态迟缓可能是疾病的早期信号……人类的身体,从来不只是执行器官,更是意图、情绪与健康状态的表达载体。
那么,在机器人、虚拟现实、神经康复等领域,机器该如何真正“读懂”这套复杂的无声语言?答案,或许并不在于追求极致的单一技术指标,而在于选择正确的“感知范式”。
一篇来自意大利罗马第二大学的权威论文《Sensory Systems for Human Body Gesture Recognition and Motion Capture》为我们提供了一个清晰而深刻的视角。论文将人体动作感知系统分为三大范式,这一分类不仅是理论,更是指导科研与应用落地的“选择地图”。
拆解核心:三大感知范式,各有何千秋?
论文指出,选择何种技术路径,根本上取决于你需要“观察”什么。
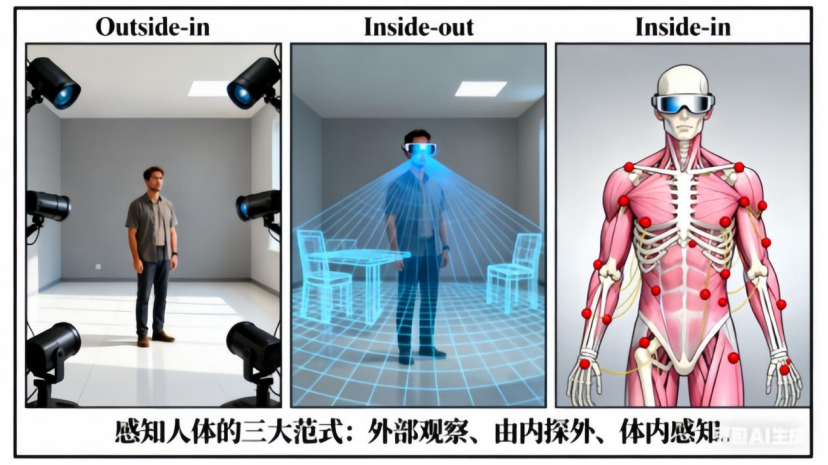
1. Outside-In(外部观察)
原理: 依赖布置在环境中的摄像头等设备,捕捉粘贴在人体表面的标记点。
特点: 精度高,被视为“金标准”。
局限: 受限于实验室环境,无法自由移动,设备昂贵且复杂。
好比: 在摄影棚里用多个高速摄像机拍摄电影动作戏--效果极致,但离不开特定场地。
2. Inside-Out(由内探外)
原理: 穿戴于人体的传感器(如IMU)通过感知外部物理场(如重力、地磁场),来计算自身在空间中的姿态和位置。
特点: 突破空间限制,支持室内外自由移动下的全身动作捕捉。
局限: 对于手指关节等精细动作的捕捉能力有限。
好比: 我们人类用自己的眼睛和平衡感来感知自己在环境中的位置和运动--灵活且自主。
3. Inside-In(体内感知)
原理: 传感器直接与身体部位接触,捕捉局部动作或生理信号(如关节弯曲、肌肉电信号、脑电波)。
特点: 直接、精准地测量特定生理或运动参数,不受环境干扰。
局限: 通常关注局部信息,缺乏全局空间定位。
好比: 医生用听诊器听你的心跳--不关心你在哪个房间,只专注于器官本身的状态。
关键洞见: 真实世界的行为是多模态耦合的。没有一种“万能”的范式,科研的成功在于根据研究目标,匹配最合适的感知范式,甚至进行多范式协同。
从理论到实践:“体内感知”范式的科研利器
基于上述框架,"体内感知"范式在精细操作、神经肌肉活动、认知状态监测等方面具有不可替代的优势。以下五类工具,正是该范式的卓越代表,为相关领域的研究提供了强大支持。
1、Captiks动捕与步态分析系统:自由移动的全身动捕专家

技术核心: 多节点IMU阵列,(加速度计+陀螺仪),实现全身姿态追踪。
科研价值: 无需外部摄像头,突破实验室限制,精准捕捉肢体在真实环境(如工厂、家庭、运动场)中的相对运动。是工业人因工程、运动生物力学、康复评估的理想工具。
2、Manus高精度动捕数据手套:手部动作的细节捕手

技术核心: 25个自由度,毫米级精度,一分钟高效部署
科研价值: 核心的尖端电磁场(EMF)追踪技术,为手势识别算法训练、虚拟现实交互优化、手部功能康复研究提供了毫米级高精度数据源。
3、Mentalab无线脑电系统:认知-运动关联的探索者

技术核心: 轻量化设计,时间同步精度±1ms,支持运动过程脑电记录。
科研价值: 长时间佩戴舒适性,揭示认知-运动关联机制。是运动准备电位研究、脑机接口开发的利器。
4、PLUX生物电传感器:神经肌肉活动的解码器
技术核心: 模块化多通道ExG(如sEMG肌电)同步采集平台,医疗级信号质量
科研价值: 高信噪比原始数据输出,支持肌肉激活时序分析与实时算法开发。广泛应用于神经康复训练、假肢控制意图解码、以及任何人机交互中需要理解运动意图的场景。
5、Bendlabs柔性传感器:无漂移的关节活动度专家

技术核心: 采用差分电容原理的医用级有机硅传感器,具备多轴、高精度、无漂移特性
科研价值: 无创、高精度监测关节活动度,并能区分被动拉伸与主动发力。这一特性在术后康复评估、运动损伤预防等需要精确量化肌肉控制能力的研究中至关重要。
范式协同:赋能前沿科研与应用的无限可能
论文的分类框架之所以重要,是因为它直接指导了高价值应用的落地。成功的案例往往是多范式协同的结果:

• 机器人遥操作与仿人学习:
由内探外(如Captiks全身动捕)捕捉操作员的全身姿态,传递给机器人进行模仿;
体内感知(如Manus数据手套)精确记录手部操作细节,使机器人能完成精细任务;
体内感知(如PLUX生物电)解码操作员的肌肉意图,实现更自然、低延迟的机器人控制。
• VR/AR沉浸式交互:
外部观察提供高精度全域定位和视觉反馈;
体内感知(如Manus数据手套)实现逼真的虚拟手部交互,大幅提升沉浸感;
由内探外支持用户在空间内自由行走探索。
• 神经科学与康复工程:
外部观察与运动捕捉结合,量化分析运动障碍;
体内感知(sEMG/EEG)双管齐下,sEMG解码运动意图控制假肢,EEG则揭示大脑在运动过程中的活动模式。
结语:系统架构决定理解深度
真正的具身智能,不在于让机器模仿人类动作,而在于让机器能像人类一样“感知”和“理解”身体语言的深层逻辑。
这篇论文的价值,正在于它提供了一把科学的钥匙。当我们能灵活运用“由内探外”的全局观测,到“体内感知”的生理解码,我们离“机器理解人类”的未来,就不再遥远。
参考文献:
论文标题: Sensory Systems for Human Body Gesture Recognition and Motion Capture
核心作者: G. Saggio, G. Orengo, A. Pallotti, V. Errico, M. Ricci
如需转载本文内容,请完整保留本声明并注明原始出处。

