
Hello Robot Stretch 3最新研究(下):展望“人机交互”未来,洞见开源如何缩短从代码到现实的路径
在上一篇文章中,我们见证了Hello Robot 移动操作机器人Stretch 3作为具身智能研究平台,在任务规划、物体操作与自主导航方面的卓越表现。然而,技术的终极目标是服务于人。本篇将聚焦于Hello Robot 移动操作机器人在 “人机交互领域” 的三大创新,并揭示其强大的开源生态如何成为从科研突破到实际应用的“加速引擎”。

二、人机交互:让机器人成为“易控制、会协作、更友好”的伙伴
当机器人走进家庭、医院,“如何自然交互”成为核心命题。Stretch 3机器人在人机交互领域的三篇论文,从“远程控制—协作模式—直觉操作”三个层面,创新了人与机器的沟通方式:
1、AccessTeleopKit:无障碍远程操作新范式

华盛顿大学开发的网页端工具包,让肢体障碍用户通过“点选+语音”控制Stretch 3机器人。用户点击屏幕目标位置,机器人自动规划路径;配合语音指令(如“慢一点”“再高些”),即可完成取物、开门等任务。
脊髓损伤患者测试显示,日常任务完成率从32%提升至85%,且平均学习时间仅需2小时——这让“科技无障碍”不再是口号。

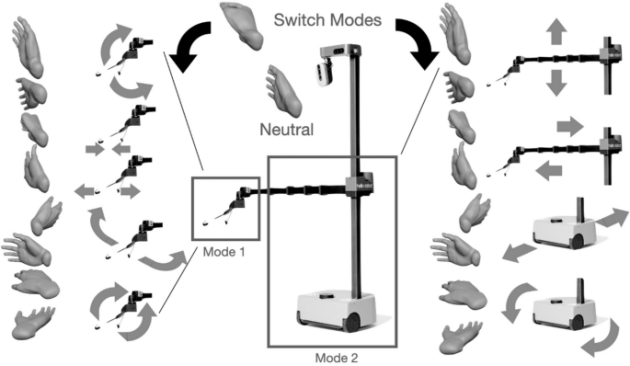
2、Stretch with Stretch:双机协作的“康复教练”
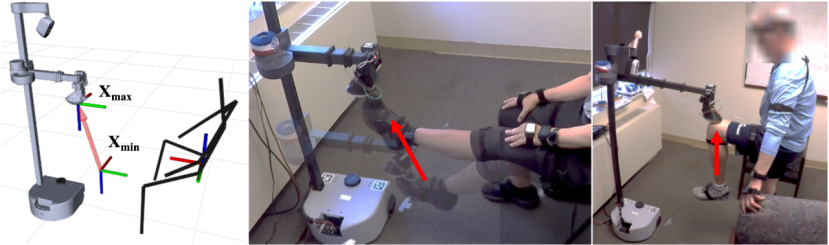
两个机器人如何像队友一样配合?埃默里大学设计的物理治疗游戏系统,让两台Hello Robot机器人协作引导帕金森患者完成拉伸运动。临床数据显示,患者治疗依从性提升60%,运动功能评分改善25%,拓展了机器人辅助康复的新场景。
3、HDEMG手势控制:肌电信号的“直觉操控”
无需遥控器,动动手指就能指挥机器人?卡内基梅隆大学研发的高密度肌电传感器,使Stretch 3移动操作机器人能识别细微手势(如握拳、伸指),控制延迟0.3秒,准确率94%。
测试中,用户仅用10分钟训练,即可完成“拧瓶盖”“递水杯”等精细操作——这为人机协作注入了“直觉化”基因。

三、开源生态:从科研到应用的“加速引擎”
纵观这六项顶尖研究,其共同底色是Hello Robot对开源的坚持。Stretch 3不仅开放硬件接口,更将算法代码、训练数据集同步至GitHub社区,目前已吸引全球200多所高校基于该平台开展研究。

这种“科研-开源-社区再创新”的飞轮效应,正持续推动具身智能与人机交互技术走向更多真实场景——无论是家庭服务机器人、医院辅助设备,还是工业协作机械臂,Hello Robot已成为连接学术突破与产业应用的关键桥梁。
未来,随着更多研究者加入这一开源生态,我们有望看到机器人能更深入地理解人类需求,成为我们生活中不可或缺的伙伴。而这一切的创新起点,或许就源于您下一个基于Hello Robot的开源代码的实验。

【版权声明】
本文部分技术内容及数据援引自Hello Robot 社区最新研究论文,论文链接见每篇论文介绍后附上的图片二维码。
如需转载,请完整保留本声明并注明原始出处。

