
Hello Robot Stretch 3最新研究(上):深入机器人的“思考”与“操作”内核,探索自主智能边界
近日,Hello Robot移动操作机器人Stretch 3凭借其出色的灵活性和开源特性,成为全球顶尖实验室的焦点。在IROS、RSS、CORL等顶级机器人会议上,以其为研究平台产出的六项高水平成果,正从“具身智能”与“人机交互”两大方向拓展服务机器人的技术边界。

本篇将重点解析Hello Robot在具身智能——即让机器人“会思考、能操作、懂导航”方面的三大前沿突破。
一、具身智能:从实验室走向复杂现实的“思考与行动”能力
具身智能是机器人感知环境、自主决策的核心。Hello Robot Stretch 3凭借其7自由度机械臂、全向移动底盘及高度开放的接口,为研究者提供了验证先进算法的优质载体。
1、Robot Utility Models:零样本部署的“任务大脑”
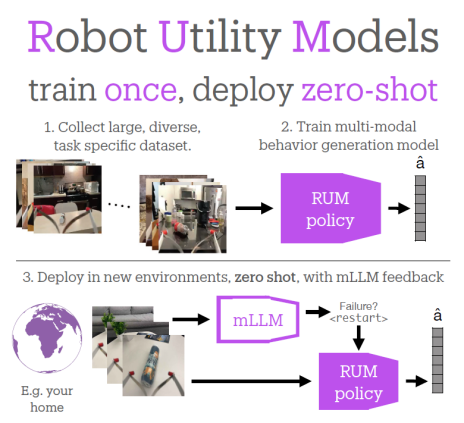
传统机器人在新环境中需重新训练,而纽约大学团队基于Stretch 3开发的效用模型,通过预训练“任务价值评估算法”,实现90%的零样本部署成功率。在厨房场景测试中,机器人可自主判断“取餐具”优先于“整理台面”,任务效率提升40%。这意味着未来家庭服务机器人可自主规划“先做饭还是先打扫”,真正实现“智能管家”角色。
2、开放铰接物体操作:解锁未知物体的“机械巧手”
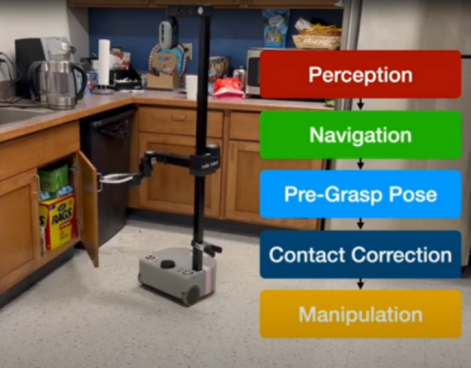
伊利诺伊大学团队让Stretch 3开源操作机器人具备“观察-尝试-调整”能力:通过视觉识别物体结构(如抽屉滑轨),结合力反馈调整操作力度,使Stretch 3对15类未知家用物体首次操作成功率达87%,尤其适用于老旧家具,突破了家庭服务机器人“入户第一关”难题。

3、PoliFormer导航:现实动态环境的“领航员”
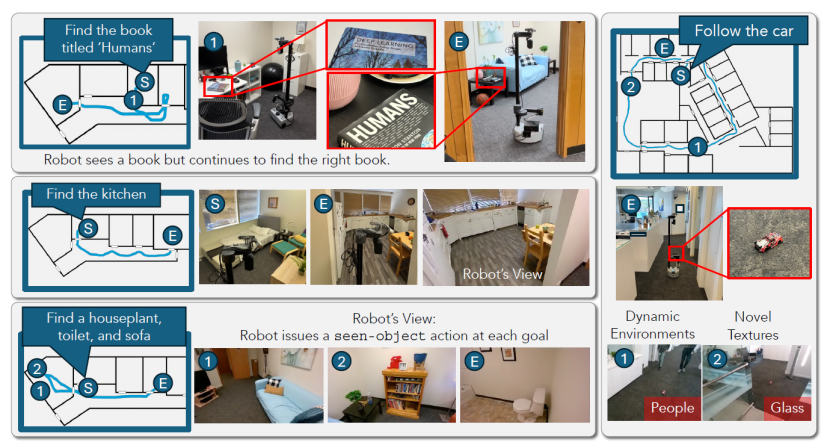
艾伦人工智能研究院(AI2)提出的 PoliFormer 导航框架,基于 Transformer 与强化学习,实现从感知到动作的端到端学习。在 Stretch 3 机器人上验证显示,其可在人流密集的医院走廊中,根据“找到那本书”等指令完成导航,避障响应仅 0.4 秒,成功率 95%。为移动操作机器人在公共场景应用奠定了基础。

以上三大研究展示了Hello Robot Stretch 3如何助力机器人提升在复杂环境中的“自主性”。然而,当机器人真正走进我们的生活,与“人”的自然、高效、安全的交互便成为核心命题。
那么,Hello Robot在人机交互领域又带来了哪些创新,使其不仅能独立完成任务,更能成为人类的贴心助手与协作伙伴呢?请看下一篇文章,我们一起来共同学习与探讨。
【版权声明】
本文部分技术内容及数据援引自Hello Robot 社区最新研究论文,论文链接见每篇论文介绍后附上的图片二维码。
如需转载,请完整保留本声明并注明原始出处。

